Products
Magnet Assemblies
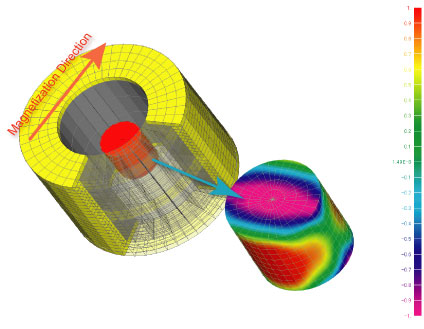
Magnetic Circuit Analysis
Process
Company
News
Rare Earth Magnet Basics
Download
CONTACT US
Contact us
For inquiries regarding rare earth magnets